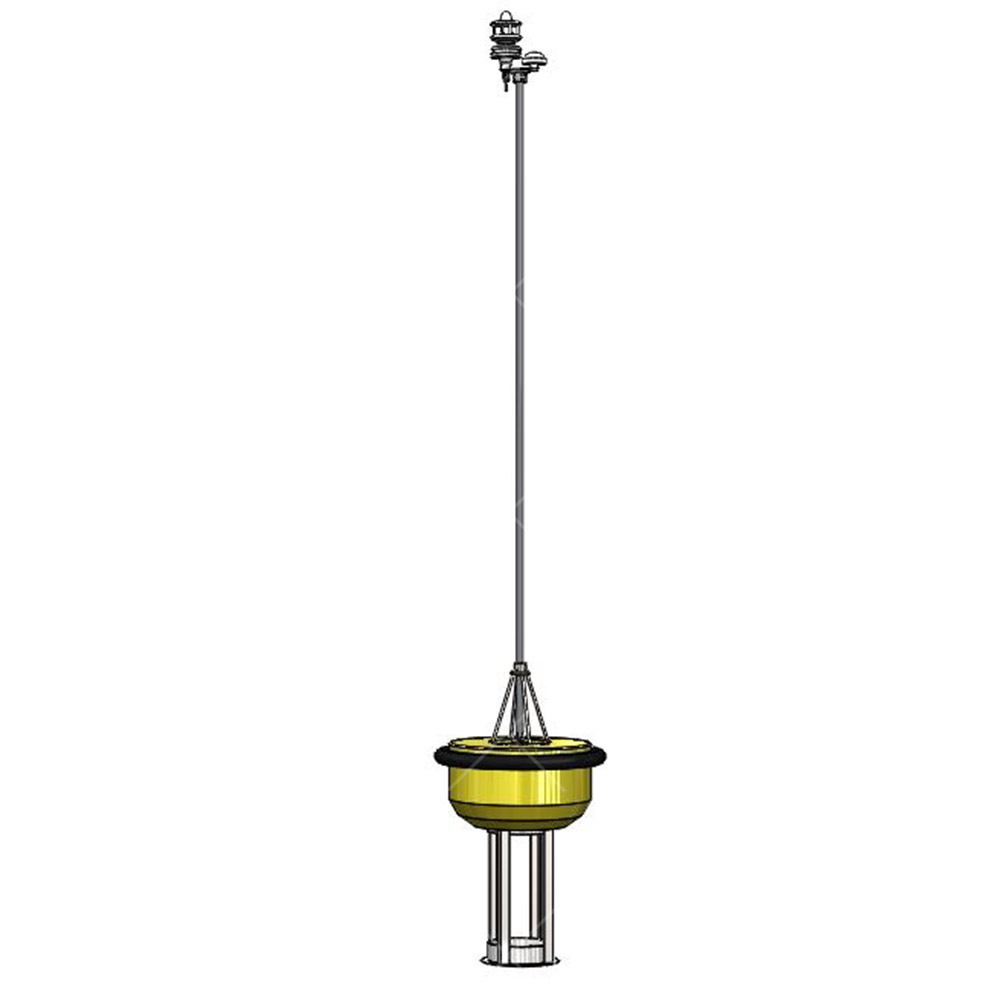

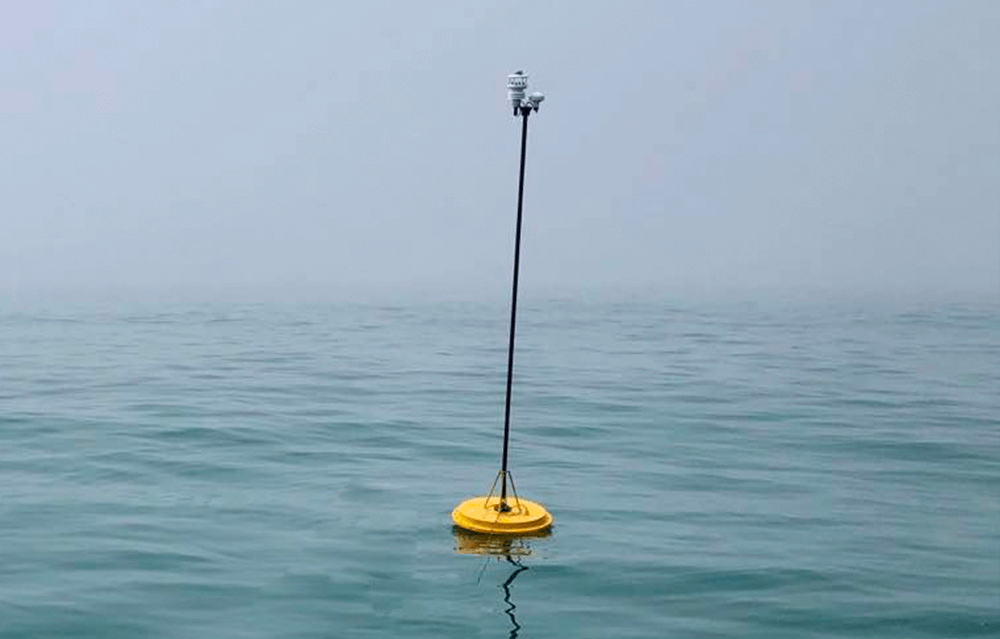
Hoë akkuraatheid GPS intydse kommunikasie ARM-verwerker Windboei
Tegniese Parameter
Satellietposisionering: GPS-posisionering
Data-oordrag: Standaard Beidou-kommunikasie (4G/ Tiantong/Iridium beskikbaar)
Konfigurasiemodus: Plaaslike konfigurasie
Metingsparameters
| Windspoed | |
| Reikwydte | 0.1 m/s - 60 m/s |
| Akkuraatheid | ± 3%(40 m/s) |
| ± 5%(60 m/s) | |
| Resolusie | 0.01m/s |
| Beginspoed | 0.1m/s |
| Steekproeftempo | 1 Hz |
| Eenheid | m/s, km/uur, mph, knope, vt/min |
| Windrigting | |
| Reikwydte | 0-359° |
| Akkuraatheid | ± 3°(40 m/s) |
| ± 5°(60 m/s) | |
| Resolusie | 1° |
| Steekproeftempo | 1 Hz |
| Eenheid | Graad |
| Temperatuur | |
| Reikwydte | -40°C ~+70°C |
| Resolusie | 0.1°C |
| Akkuraatheid | ± 0.3°C @ 20°C |
| Steekproeftempo | 1 Hz |
| Eenheid | °C, °F, °K |
| Humiditeit | |
| Reikwydte | 0 ~100% |
| Resolusie | 0.01 |
| Akkuraatheid | ± 2% @ 20°C (10%-90% RH) |
| Steekproeftempo | 1 Hz |
| Eenheid | % Rh, g/m3, g/Kg |
| Doupunt | |
| Reikwydte | -40°C ~ 70°C |
| Resolusie | 0.1°C |
| Akkuraatheid | ± 0.3°C @ 20°C |
| Eenheid | °C, °F, °K |
| Steekproeftempo | 1 Hz |
| Lugdruk | |
| Reikwydte | 300 ~ 1100 hPa |
| Resolusie | 0.1 hPa |
| Akkuraatheid | ± 0.5hPa@25°C |
| Steekproeftempo | 1 Hz |
| Eenheid | hP'n staaf, mmHg, inHg |
| Reënval | |
| Meetvorm | Optika |
| Reikwydte | 0 ~ 150 mm/h |
| ReënvalResolusie | 0.2mm |
| Akkuraatheid | 2% |
| Steekproeftempo | 1 Hz |
| Eenheid | mm/h, mm/totale reënval, mm/24 uur, |
| Uitset | |
| Uitsetkoers | 1/s, 1/min, 1/u |
| Digitale uitvoer | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| Analooguitvoer | gebruik 'n ander toestel |
| Krag | |
| Kragtoevoer | 5 t~30V GS |
| Krag (nominaal) 12 V GS | 80 mA deurlopende hoë kragverbruikmodus |
| 0.05mA ekonomiese kragverbruikmodus (1 uur gepols) | |
| Omgewingstoestande | |
| IP-beskermingsvlak | IP66 |
| Werktemperatuurreeks | -40°C ~ 70°C |
| EMC-standaard | BS EN 61326: 2013 |
| FCC CFR47 onderdele 15.109 | |
| CE-teken | √ |
| Voldoen aan RoHS | √ |
| Gewig | 0.8 kg |
Kenmerk
ARM-kern hoë-doeltreffendheidsverwerker
Kommunikasie in reële tyd
Optimaliseer algoritmes verwerk data
Hoë akkuraatheid GPS-posisioneringstelsel