
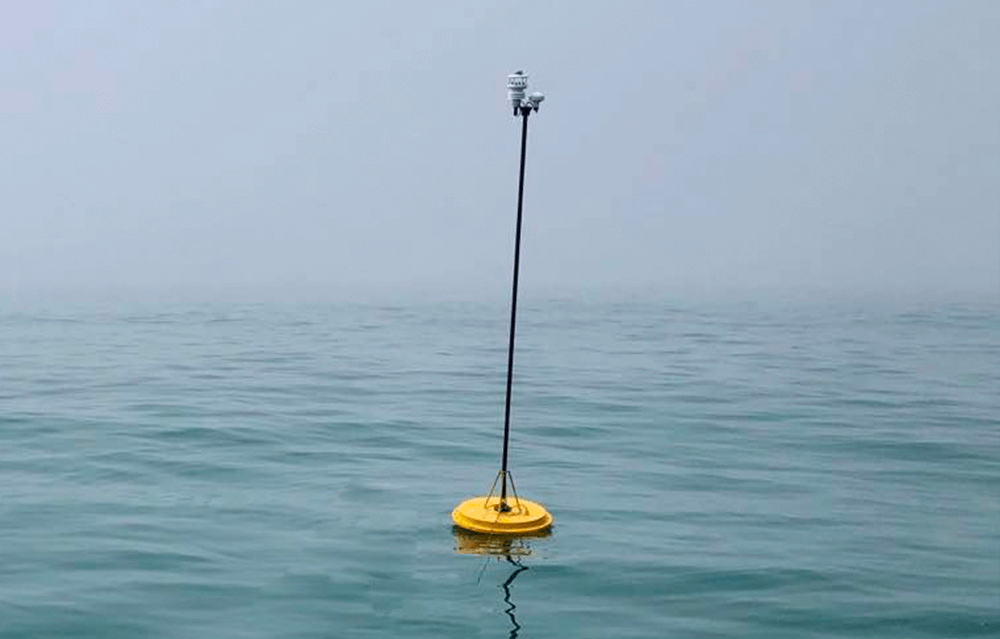
GPS דיוק גבוה תקשורת בזמן אמת מעבד ARM מצוף רוח
פרמטר טכני
מיקום לווייני: מיקום GPS
העברת נתונים: תקשורת Beidou ברירת מחדל (4G/Tiantong/Iridium זמין)
מצב תצורה: תצורה מקומית
פרמטרי מדידה
| מהירות הרוח | |
| לָנוּעַ | 0.1 מטר/שנייה - 60 מטר/שנייה |
| דִיוּק | ± 3%(40 מטר/שנייה) |
| ± 5%(60 מטר/שנייה) | |
| הַחְלָטָה | 0.01 מטר/שנייה |
| מהירות התחלתית | 0.1 מטר/שנייה |
| קצב דגימה | 1 הרץ |
| יְחִידָה | מטר/שנייה, ק"מ/שעה, מייל/שעה, קשרים, רגל/דקה |
| רוּחַכיוון | |
| לָנוּעַ | 0-359° |
| דִיוּק | ± 3°(40 מטר/שנייה) |
| ± 5°(60 מטר/שנייה) | |
| הַחְלָטָה | 1° |
| קצב דגימה | 1 הרץ |
| יְחִידָה | תוֹאַר |
| טֶמפֶּרָטוּרָה | |
| לָנוּעַ | 40°C- ~ 70°C+ |
| הַחְלָטָה | 0.1°C |
| דִיוּק | ± 0.3°C ב-20°C |
| קצב דגימה | 1 הרץ |
| יְחִידָה | מעלות צלזיוס, מעלות פרנהייט, מעלות קיילוויין |
| לַחוּת | |
| לָנוּעַ | 0 ~ 100% |
| הַחְלָטָה | 0.01 |
| דִיוּק | ± 2% ב-20°C (10%-90% לחות יחסית) |
| קצב דגימה | 1 הרץ |
| יְחִידָה | % לחות יחסית, גרם/מ"ק, גרם/ק"ג |
| נקודת טל | |
| לָנוּעַ | -40°C ~ 70°C |
| הַחְלָטָה | 0.1°C |
| דִיוּק | ± 0.3°C ב-20°C |
| יְחִידָה | מעלות צלזיוס, מעלות פרנהייט, מעלות קיילוויין |
| קצב דגימה | 1 הרץ |
| לחץ אוויר | |
| לָנוּעַ | 300 ~ 1100hPa |
| הַחְלָטָה | 0.1 hPa |
| דִיוּק | ± 0.5hPa@25°C |
| קצב דגימה | 1 הרץ |
| יְחִידָה | hPא, בר, מ"מ כספית, אינצ'ה כספית |
| יְרִידַת גְשָׁמִים | |
| טופס מדידה | אוֹפְּטִיקָה |
| לָנוּעַ | 0 ~ 150 מ"מ/שעה |
| יְרִידַת גְשָׁמִיםהַחְלָטָה | 0.2 מ"מ |
| דִיוּק | 2% |
| קצב דגימה | 1 הרץ |
| יְחִידָה | מ"מ/שעה, מ"מ/סה"כ גשם, מ"מ/24 שעות, |
| תְפוּקָה | |
| קצב תפוקה | 1/שנייה, 1/דקה, 1/שעה |
| פלט דיגיטלי | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| פלט אנלוגי | להשתמש במכשיר אחר |
| כּוֹחַ | |
| ספק כוח | 5 t~30V DC |
| הספק (נומינלי) 12 וולט DC | מצב צריכת חשמל גבוהה רציפה של 80 מיליאמפר |
| מצב צריכת חשמל חסכונית של 0.05mA (שעה אחת של סקר) | |
| תנאי סביבה | |
| רמת הגנה של IP | IP66 |
| טווח טמפרטורות עבודה | -40°C ~ 70°C |
| תקן EMC | תקן EN 61326: 2013 |
| חלקי FCC CFR47 15.109 | |
| סימן CE | √ |
| תואם ל-RoHS | √ |
| מִשׁקָל | 0.8 ק"ג |
תכונה
מעבד ARM core יעילות גבוהה
תקשורת בזמן אמת
אופטימיזציה של נתוני עיבוד אלגוריתמים
מערכת מיקום GPS מדויקת במיוחד